 Tracilogis – CP2 : Cellule de Production Cyber-Physique
Tracilogis – CP2 : Cellule de Production Cyber-Physique
| Département : Ingénierie des Systèmes Éco-Techniques Responsables scientifiques : Guillaume DEMESURE, Hind BRIL EL-HAOUZI Responsables techniques : Emmanuel ZIMMERMANN, Rémi PANNEQUIN Financement : 65k€ CPER Cyber-Entreprises, 30k€ AM2I, Université de Lorraine100 k€ Thèses associées 2016 – 2021 : Emmanuel ZIMMERMANN (2019), Tsegay MEZGEBE (2020), Étienne VALETTE (en cours), Sylvain CHABANET (en cours) |
Objectifs scientifiques
Cette cellule a été principalement développée dans le cadre de l’ERT et du CPER SGE (Sciences et Génie de l’Environnement) dont l’objectif premier était de structurer le Campus Bois d’Epinal en appui avec le Pôle de Compétitivité Fibres Grand’Est (période 2007-2013, aujourd’hui pôle fibres-énergivie) d’une plateforme de démonstration d’une chaine d’assenblage/dé-assemblage à échelle semi-industrielle. Elle offre un environnement de tests permettant de :
— mettre en oeuvre, tester et comparer différentes techniques de traçabilité (invasives ou non) au sein de la chaîne logistique en général et de la filière bois, en particulier ;
— offrir un environnement de test permettant la mise en oeuvre de scénario de production dans un contexte centralisé, distribué ou hybride (HMS – Holonic Manufacturing Systems).
Depuis 2017, nos activités de recherche traitent d’un nouvel axe autour de l’agilité des systèmes manufacturiers basée sur les entities mobiles AGV ou AMR avec deux dimensions :
— l’agilité de la partie physique du système manufacturier, où les entités mobiles sont une réponse pour faire face aux différentes formes de variabilité (changements rapides du marché, re-séquencement, pannes. . .). Les verrous scientifiques concernent la manière d’organiser les flux avec efficience (quelles
entités seront mobiles : les produits, les machines ou les deux ? quelle flexibilité de routage peut-on permettre ? Est-ce que les entités suivent des chemins prédéfinis, doivent-ils choisir parmi plusieurs chemins donnés ou doivent-ils planifier leur chemin jusqu’à la destination. . .).— l’agilité au niveau du système de pilotage et en particulier la question de la coordination et de la coopération entre les éléments mobiles, puisque l’ensemble de ces éléments resteront dans un espace commun qu’ils devront se partager. Il faudra donc assurer la coopération et la coordination des différentes décisions afin d’éviter des collisions, par exemple et que les décisions locales ne dégradent pas les performances au niveau du système global. On cherchera ici à déterminer la manière de distribuer correctement l’intelligence (embarquabilité) entre les différentes entités qu’elles soient mobiles ou non, à concevoir le(s) rôle(s) et le(s) comportement(s) de chaque entité, les algorithmes de négociation ou de consensus permettant au système manufacturier de rester agile sans dégrader les performances globales.
Description
La cellule, installée dans un espace de plus de 100 m2 sur le campus P. Séguin d’Épinal, intègre différentes technologies constitutives des système cyber physiques. Elle se structure en quatre zones pouvant échanger des flux de produits. Chacune de ces zones intègre des équipements automatisés pour le convoyage des produits et l’exécution de transformations (assemblages, désassemblage, marquages, etc.), contrôlés, grâce à un bus de terrain, par un automate programmable industriel. Des instruments d’identification (RFID) et de localisation en temps réel (RTLS) des produit permettent la synchronisation fine entre les produits « physiques » et leur
représentation informatique.
Depuis 2016, plusieurs actions ont été réalisées pour accroitre les possibilités de cette cellule pour la recherche, le transfert et l’enseignement grâce notamment à divers financement (CPER Cyber-Entreprises, 2015-2020)
ou un financement dans le cadre du Pacte Lorrain pour les grandes écoles en 2018 qui a permis l’acquisition de 4 robots FANUC (LRmate) installés sur la plateforme. Plus récement, 2021 et dans l’objectif d’apporter plus d’agilité à l’installation actuelle, un financement de 30 kC a été octroyé par l’Université de Lorraine pour l’achat d’un AMR (Autonomous Mobile Robot), qui est actuellement en cours d’intégration.
Du point de vue logiciel, les expérimentations s’appuient sur une approche multi-agents, en exploitant un ensemble de logiciels spécifiquement développés avec la bibliothèque JADE. Dans cette approche, chaque élément de la cellule est associé à un agent, composant modulable capable de découvrir son environnement, d’exécuter des comportements, et de collaborer avec les autres agents dans la logique d’un système cyberphysique.
Les propositions de pilotage résultant des activités de recherche sont donc éprouvées puis intégrées en tant que nouveaux types d’agent.

FIGURE 39 – La cellule de production cyber-physique.
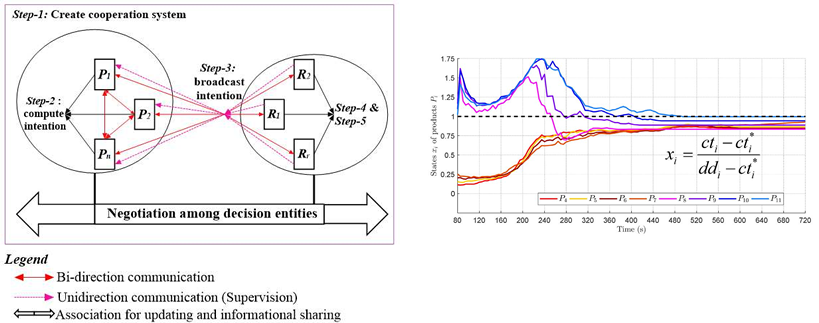
FIGURE 40 – (a) Schéma de négociation entre les agents-produits basée leurs intention, et (b) exemple de résultats de négociation basée sur le consensus : le graphe représente l’évolution des états des produit (reflétant
leur performance individuelle), on constate une convergence, correspondant à l’optention d’un compromis lors de la négociation.