 RELanS (Réseaux Embarqués dans les Lanceurs Spatiaux)
RELanS (Réseaux Embarqués dans les Lanceurs Spatiaux)
| Département : Ingénierie des Systèmes Éco-Techniques Responsables scientifiques : Thierry DIVOUX, Jean-Philippe GEORGES Responsables techniques : Rémi PANNEQUIN Financement : 100 k€, contrats CRAN-CNES Thèses associées 2016-2021 : Dorine PETIT (2018) |
Objectifs scientifiques
Le CRAN entretient depuis 2007 un partenariat pérenne avec le CNES (Centre National d’Études Spatiales). L’objectif est d’étudier le remplacement du vieux bus de communication militaire datant des années 70 embarqué dans les lanceurs, au profit d’un réseau de type COTS (Component On The Shelves) basé sur des standards (Ethernet), plus performant en termes de débit, de fiabilité, de coût, …
Ce système de communication doit non seulement égaler son prédécesseur en matière de temps réel pour la commande, mais supporter de nouvelles applications, de télémétrie par exemple, ou d’acheminement de trafic vidéo. Il doit bien sûr également satisfaire aux contraintes spécifiques du domaine spatial : faible poids, robustesse à la séparation d’étage, rapidité de reconfiguration, possibilité d’observer la totalité du trafic afin de pouvoir en faire l’analyse a posteriori en rejouant les vols.
Les premières études ont conduit à retenir un réseau standard de type Ethernet commuté (figure 37). C’est une véritable rupture technologique qui conduit à utiliser un système a priori non déterministe pour supporter une
application temps-réel, et ouvre l’opportunité de rompre avec une commande centralisée au profit d’un contrôle distribué modulaire et plus réactif.
Nous avons montré en appliquant des techniques mathématiques de type « network calculus » que ces contraintes pouvaient être respectées en rejouant des scénarios de vols passés sur ce type d’architecture. Nous avons également développé des techniques de reconfiguration rapide, compatibles avec les exigences de la commande en cas de séparation d’étage ou de défaillance d’un lien ou d’un commutateur. Nous avons ensuite mis en place
des mécanismes de classification de service permettant d’envisager le support d’un trafic supplémentaire de télémétrie ou de vidéo, préservant la garantie de bon acheminement du trafic de commande. Enfin, nous avons
imaginé un dispositif non invasif d’observation exhaustive de tous les trafics permettant l’enregistrement de l’ensemble des communications au cours d’un vol. Cette dernière phase a soulevé d’importants problèmes de
synchronisation d’horloge.
Ainsi, nous avons atteint un niveau de maturité technologique TRL3 (Technological Readiness Level). Il suppose des études analytiques et des expérimentations en laboratoire validant les prévisions sur les éléments séparés de la technologie, et inclut des composants qui ne sont pas encore intégrés ou représentatifs.
Description
Nous avons décidé de passer au niveau TRL4 pour lequel les composants technologiques (matériels et logiciels) de base sont intégrés afin d ’établir que toutes les parties fonctionnent ensemble. Un système de communication
grandeur nature a donc été réalisé, avec des composants certes non « durcis spatial », mais implémentant toutes les « briques » validées individuellement au niveau TRL3 (figure 38). Le démonstrateur est composée de :
— 8 commutateurs Cisco IE 3000 (implémentant le protocole de synchronisation IEEE1588/PTP) ;
— 1 commutateur Cisco 2950 series est utilisé pour émuler la liaison sol/bord ;
— 93 micros-PC (type Raspberry PI) utilisés pour la génération de trafic (86 à bord et 7 au sol) ;
— 8 PC contenant deux cartes Ethernet (dont une carte PTP-IEEE1588 Meinberg PTP270-PEX) pour
l’observabilité ;
— 124 câbles Ethernet catégorie 6 (de longueur variable) pour une longueur totale de 192,5 m.
Grace à ce dispositif, nous pouvons aller au-delà de la validation de nos propositions par simulation, et mettre en évidence les lacunes des équipements réseau actuellement disponibles sur le marché.
La standardisation Ethernet a évolué, avec plusieurs amendements (IEEE 802.1AB, AS, ASbt, AQ, CB, Qca, Qaz, Qat, Qav, Qbv, Qch, Qci, Qbu, Qcc, Qbp, Qbz), regroupés depuis 2014 sous le terme de Time-Sensitive Networking (TSN). TSN a la vocation de doter Ethernet de capacités temps réel intrinsèques, permettant un contrôle avec une latence de quelques nanosecondes, garantissant la livraison et la gigue au travers du standard
Ethernet. Aussi, le démonstrateur a été enrichie par l’achat de 5 commutateurs Cisco « Industrial Ethernet 4000 » intégrant cette évolution.
Le réseau n’est classiquement observable que localement via des ports « miroirs » sur les commutateurs là où des produits comme les TAP (Terminal Access Point) permettent de capturer le trafic directement (et de manière
passive et transparente) sur les liens. L’enjeu pour le contrôle et l’observabilité est de réduire les latences de mesure, de détection et les décalages d’horloges. Aussi, 8 TAP ont été acquis et installés sur le démonstrateur.
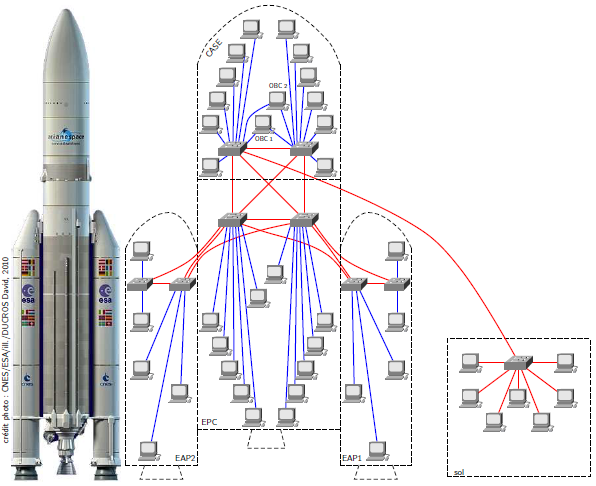
FIGURE 37 – Topologie du réseau.
